Assemble Stacking Application: Difference between revisions
mNo edit summary Tag: Reverted |
mNo edit summary |
||
| (2 intermediate revisions by the same user not shown) | |||
| Line 1: | Line 1: | ||
This 2-part application first picks and stacks two components and then screws them together in the next part. | This 2-part application first picks and stacks two components and then screws them together in the next part. | ||
'''Developer''': [https://rbtx.com | '''Developer''': [https://rbtx.com RBTX] | ||
Video part 1: [https://downloads.cpr-robots.com/Wiki-Files/Examples/Assemble_Stacking/Assamble_Stacking_Video.mp4 Stacking] | Video part 1: [https://downloads.cpr-robots.com/Wiki-Files/Examples/Assemble_Stacking/Assamble_Stacking_Video.mp4 Stacking] | ||
| Line 14: | Line 14: | ||
== Part 1: Stacking == | == Part 1: Stacking == | ||
[[File:Assamble_Stacking_Setup.jpg|thumb|250px]] | [[File:Assamble_Stacking_Setup.jpg|thumb|250px|link=]] | ||
The gantry robot is equipped with a parallel gripper. | The gantry robot is equipped with a parallel gripper. | ||
| Line 22: | Line 22: | ||
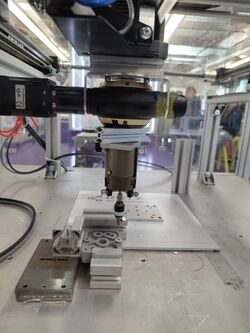
== Part 2: Screw == | == Part 2: Screw == | ||
[[File:Assemble_Screw_Endeffector.jpg|thumb|250px]] | [[File:Assemble_Screw_Endeffector.jpg|thumb|250px|link=]] | ||
The gantry robot is equipped with a screwdriver-bit that is magnitized by a fixed magnet. The endeffector is mounted on a [https://www.igus.eu/product/22645?C=DE&L=en&artNr=LCA-RG-DSA-1A-1280-0100 Apiro rotary unit] for turning the screw. | The gantry robot is equipped with a screwdriver-bit that is magnitized by a fixed magnet. The endeffector is mounted on a [https://www.igus.eu/product/22645?C=DE&L=en&artNr=LCA-RG-DSA-1A-1280-0100 Apiro rotary unit] for turning the screw. | ||
The positions of the components are fixed (result of "Step 1"). | The positions of the components are fixed (result of "Step 1"). | ||
Latest revision as of 13:57, 18 May 2026
This 2-part application first picks and stacks two components and then screws them together in the next part.
Developer: RBTX
Video part 1: Stacking
Video part 2: Screw
Program files: Assemble_Stacking_Programs.zip
Setup
Robot Type: igus Gantry DLE-RG-0012
Part 1: Stacking

The gantry robot is equipped with a parallel gripper.
The positions of the components are fixed.
Part 2: Screw
The gantry robot is equipped with a screwdriver-bit that is magnitized by a fixed magnet. The endeffector is mounted on a Apiro rotary unit for turning the screw.
The positions of the components are fixed (result of "Step 1").