Firmware Parameter Configuration
While most robot specific settings are stored in the configuration files in CPRog/iRC and on the embedded control axis specific settings are stored in the axis control modules themselves. This includes parameters for motion, referencing and motor current. This article explains these parameters and how to access them.
This article applies to all robots with modular control, robolink DCI and ReBeL joints. It does not apply to the Mover robots.
General Procedure
- Load the firmware parameters from the axis modules
- Change values using a basic text editor
- Upload the file to the modules
- Restart the robot
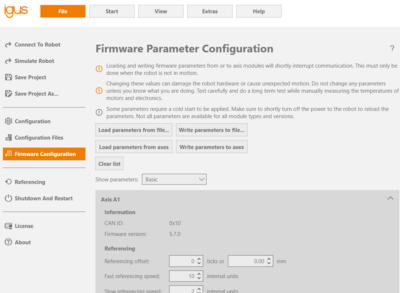
Since iRC version 15.0.0 you can change the firmware parameters directly in software. Simply go to "File -> Firmware Configuration" and "Load parameters from axes". Change the values and upload them back to the modules via "Write parameters to axes".
Download Configuration
- Open CPRog/iRC
- Connect to the robot via Ethernet or a USB-CAN-Adapter
- Check if all green LEDs on top of all motor modules are blinking. If a module is not blinking, it might not be configured correctly. Did you save the project and restart the hardware?
- Click "File" at the top of CPRog/iRC to access the backstage menu
- V14 and older:
- Click "Get Amp configuration" (see the image below)
- V15 and newer:
- Go to "Configuration Files", scroll down to "Firmware Parameters" and click "Load from robot..."
- Now a parameter file is written in the Data\Backup directory in the CPRog/iRC installation directory (e.g. C:\CPRog\Data\Backup or C:\iRC-igusRobotControl\Data\Backup)
Upload Configuration
- Change the file according to your requirements using a basic text editor like Notepad or Notepad++ (see section Parameter File below)
- V14 and older:
- Click "Set Amp configuration"
- V15 and newer:
- Go to "Configuration Files", scroll down to "Firmware Parameters" and click "Write to robot..."
- Choose the updated .dat file
- Wait until all parameters are written, approx 20s. Another backup of the previous values is also created.
- For some parameter, e.g. the encoder direction, the control needs a cold restart
- Test if the changes result in a better performance.


Verification of Joint Operation
Now the correct operation of the joints needs to be verified.
- Be ready to press the emergency stop button. Changing parameters can result in unexpected motion, especially when setting up an unknown axis.
- Once the controller has booted up, the motor module LEDs are blinking green, connect, reset and enable the robot.
- Try to move the joint by clicking on the buttons in the jog section of CPRog/iRC.
- If the joint moves correctly check whether it references. Click Reference, then Reset, Enable, Reference axis. Watch for collisions and use the emergency stop if necessary - the referencing motion might not stop if not set up correctly. If the joint shows up as "referenced" the referencing works correctly. The position lag error is the expected state, reset it by clicking Reset and Enable.
- Next set up a program that moves the axis over 30-60min. Observe the module temperature in CPRog/iRC and the motor temperature (there are no sensors in the motor itself). Increase the motor current, if the axis is struggling to move or reduce the motor current if the motor or motor module is getting hot.
Parameter File
The parameter files contain a set of parameter for each joint of the robot. "Joint0" is the set for the first axis, "Joint1" for the second etc. The parameter "ID" is the CAN ID in decimal format as selected at switch/jumper/etc at the module.
<Joint0 ID="16" Version="Product 0x42 FW 0x02 0x10"...
Currently there are two parameter formats: V1 and V2. V2 is used by newer BLDC axis controllers (e.g. ReBeL joints). The parameter format is preselected by a configuration parameter.
Parameter V1
<!-- Parameter set for Commonplace Robotics robotics control /-->
<!-- Target Robot: igus robolink /-->
<!-- support@cpr-robots.com /-->
<AmpParameter>
<Configuration ModuleType="RailStepperV02" NrOfJoints="3"/>
<Joint0 ID="16" Version="Product 0x42 FW 0x02 0x10"
ComTimeOut="2000" MaxCurrent="200" MaxLag="5000" EncoderErrorDetection="0" PosP="1.000" PosI="0.0000" PosD="0.000" PosAWU="30"
Encoder="True" SwapEncoderDirection="False" EndSwitchRising="True" StopOnEndSwitch="False" UseIndexAsRef="False"
RefStraight="False" RefSinus="False" RefHalf="True" SinusRefTics="2000" SinusRefMaxCycles="6"
Offset="0" RefSpeed="50" RefSpeedSlow="10" RefFromBothSides="True"
SGThreshold="2" CSLoad="18" CSStart="18" CSIdle="6" CSRef="15" StartArea="200"
MinSupplyVoltage="500" MaxTemperature="500" Microstepping="0"
/>
<Joint1 ID="32" Version="Product 0x42 FW 0x02 0x10"
ComTimeOut="2000" MaxCurrent="200" MaxLag="5000" EncoderErrorDetection="0" PosP="1.000" PosI="0.0000" PosD="0.000" PosAWU="30"
Encoder="True" SwapEncoderDirection="False" EndSwitchRising="True" StopOnEndSwitch="False" UseIndexAsRef="False"
RefStraight="False" RefSinus="False" RefHalf="True" SinusRefTics="2000" SinusRefMaxCycles="6"
Offset="891" RefSpeed="-50" RefSpeedSlow="-10" RefFromBothSides="True"
SGThreshold="2" CSLoad="26" CSStart="26" CSIdle="10" CSRef="20" StartArea="200"
MinSupplyVoltage="500" MaxTemperature="500" Microstepping="0"
/>
<Joint2 ID="48" Version="Product 0x42 FW 0x04 0x07"
ComTimeOut="3000" MaxCurrent="0" MaxLag="5000" EncoderErrorDetection="1000" PosP="1.000" PosI="0.0000" PosD="0.000" PosAWU="0"
Encoder="True" SwapEncoderDirection="False" EndSwitchRising="True" StopOnEndSwitch="False" UseIndexAsRef="False"
RefStraight="True" RefSinus="False" RefHalf="False" SinusRefTics="500" SinusRefMaxCycles="6"
Offset="-1" RefSpeed="40" RefSpeedSlow="5" RefFromBothSides="True"
SGThreshold="2" CSLoad="10" CSStart="10" CSIdle="3" CSRef="8" StartArea="200"
MinSupplyVoltage="500" MaxTemperature="430" Microstepping="0"
/>
</AmpParameter>
Please only change the values in quote marks, do not delete any quote marks, do not use decimal separators. This config file is case sensitive, so lower case and upper case matters.
Encoder Parameters
If the additional external axis is equipped with a motor encoder enter the parameters as shown below:
All numbers, other than those for PosP PosI and PosD must be integer.
| Parameter | Description | |
|---|---|---|
| FW version 8.9 and older | FW version 8.10 and newer | |
| ComTimeOut | Maximum duration without communication before the communication error state (error COM) is entered | Measured Bus frequency (read only) |
| MaxCurrent | not used | not used |
| MaxLag | How many encoder tics is the encoder signal allowed to lag behind the desired motor position. See also parameter EncoderErrorDetection. | How many motor full steps the encoder signal allowed to lag behind the desired motor position until encoder error state (error ENC) is entered. |
| EncoderErrorDetection | Encoder error detection: Number of tics the encoder signal is allowed to lag behind the desired motor position before the encoder error state (error ENC) is entered. Divide this value by the Gear Scale to translate to degrees or mm. | not used |
| PosP | PID control parameter P - do not change | not used |
| PosI | PID control parameter I - do not change | not used |
| PosD | PID control parameter D - do not change | not used |
| PosAWU | PID control parameter anti wind up - do not change. This value has no effect if PosI is 0. | not used |
| Encoder | Enable or disable the encoder (disable only if you got a motor without encoder) | |
| SwapEncoderDirection | Inverts the encoder direction - change if the encoder counts opposite to the motor. This does not change the motion direction, the axis will not move correctly if set to the wrong value! | |
Reference/Ini Sensor Parameters
These parameters define how the axis references itself. For referencing the referencing/ini switch and/or the motor's index pulse can be used, different motion patterns are available depending on the axis types.
All numbers must integer.
| Parameter | Description | |
|---|---|---|
| FW version 8.9 and older | FW version 8.10 and newer | |
| EndSwitchRising | Trigger on the rising edge (set to True) or on the falling edge ("False") | |
| StopOnEndSwitch | Stop referencing motion when the end-switch is triggered | not used |
| UseIndexAsRef | Use the index pulse of the motor for referencing. Set to false to use the referencing switch. | |
| UseIniAndIndexAsRef | Use the index pulse and the referencing switch for referencing. | |
| RefStraight | For linear axes: Moves in one direction until the referencing switch is reached. | |
| RefSinus | Rotational axes: Sinusoidal search motion (increasing back and forth motion until the switch is reached). | |
| RefHalf | For rotational axes with half-disc inis. The state of the referencing switch determines the search direction. | |
| SinusRefTics | How many encoder tics should the sinusoidal search motion be incremented by per period | |
| SinusRefMaxCycles | How many periods of sinusoidal search motion should be performed | |
| Offset | Distance of the 0 position to the referencing switch in encoder tics (divide by the Gear Scale to get degrees or mm). To invert the direction of the offset, reverse the sign (+/-). | |
| RefSpeed | Sets the initial referencing speed: lower is slower. To invert the direction of movement, reverse the sign (+/-) of the number. The value -1 is not allowed, use -2 instead. | Sets the initial referencing speed in RPM. |
| RefSpeedSlow | Sets the precision referencing speed: lower is slower and more precise. To invert the direction of movement, reverse the sign (+/-) of the number. The value -1 is not allowed, use -2 instead. | Sets the precision referencing speed in RPM. To invert the direction of referencing movement, reverse the sign (+/-) of the number. Changing the direction here will also change the RefSpeed direction. |
| RefFromBothSides | Use the midpoint of the trigger signal instead of the rising/falling edge. | not used |
Motor Parameters
All numbers must be integer.
Please read Motor Current Parameter for a translation of the CS parameters to amps. Values between 1 and 32 are allowed. Low values mean less current and will stall the axis under load, large values will overheat the motor/module.
| Parameter | Description | |
|---|---|---|
| FW version 8.9 and older | FW version 8.10 and newer | |
| SGThreshold | TMC2660 StallGuard threshold | not used |
| CSLoad | Current under load conditions (arbitrary units) | |
| CSStart | Current when starting a motion (arbitrary units) | not used |
| CSIdle | Current when position is held (arbitrary units) | |
| CSRef | Current during referencing (arbitrary units) | not used |
| StartArea | Speed of the start up current - do not change | not used |
| MinSupplyVoltage | Minimum voltage in ADC ticks. Below this the low voltage or estop error (error LOWV/ESTOP) occurs. '0' will turn this feature off. | |
| MaxTemperature | Maximum temperature. If the temperature of the electronics module (not motor) exceeds this value the over temperature error (error TEMP) occurs and the motor is shut off. | |
| Microstepping | Defines the microstepping - set to 0, do not change | Microsteps in 256/(2^n), n = this setting. Default is 5, range is 1-8. Set lower if you encounter unsmooth motion. Set higher if you need to go fast. |
| SlowMotionConfig | not used | not used |
Parameter V2
This format specifies one parameter per line, identified by index and subindex numbers. Name and unit are given for readability.
Please note that some parameters are only informational and can not be written. This includes serial number, firmware version and CAN ID among others.
<!-- Parameter set for Commonplace Robotics robotics control /-->
<!-- Target Robot: igus robolink /-->
<!-- support@cpr-robots.com /-->
<AmpParameter>
<Configuration ModuleType="ObjectLibrary" NrOfJoints="1"/>
<Joint0 ID="16" Version="">
<FWParameter Index="0" SubIndex="0" Name="Serialno." Value="1" Unit="" />
<FWParameter Index="0" SubIndex="1" Name="Firmware version" Value="135425" Unit="" />
<FWParameter Index="0" SubIndex="2" Name="Hardwareno." Value="80" Unit="" />
<FWParameter Index="0" SubIndex="3" Name="min. supply Voltage" Value="20000" Unit="mV" />
<FWParameter Index="0" SubIndex="4" Name="max. Boardtemp" Value="70000" Unit="m°C" />
<FWParameter Index="1" SubIndex="0" Name="Encoder Tics" Value="4000" Unit="1/Rev" />
<FWParameter Index="1" SubIndex="1" Name="no. of pole pairs" Value="4" Unit="" />
<FWParameter Index="1" SubIndex="2" Name="Winding resistance" Value="50" Unit="mOhm" />
<FWParameter Index="1" SubIndex="3" Name="Winding inductance" Value="30" Unit="mH" />
<FWParameter Index="1" SubIndex="4" Name="maxRPM" Value="3000" Unit="RPM" />
<FWParameter Index="1" SubIndex="5" Name="max. Motortemp." Value="0" Unit="m°C" />
<FWParameter Index="1" SubIndex="6" Name="max. current" Value="8000" Unit="mA" />
<FWParameter Index="1" SubIndex="7" Name="StartUpMethod" Value="4" Unit="" />
<FWParameter Index="1" SubIndex="8" Name="Rotor offset" Value="0" Unit="Tics" />
<FWParameter Index="1" SubIndex="9" Name="Encoder inverted" Value="0" Unit="bool" />
<FWParameter Index="1" SubIndex="10" Name="Motor inverted" Value="0" Unit="bool" />
<FWParameter Index="1" SubIndex="11" Name="OpenLoopCurrent" Value="2000" Unit="mA" />
<FWParameter Index="1" SubIndex="12" Name="OpenLoopCurrent Standstill" Value="50" Unit="mA" />
<FWParameter Index="1" SubIndex="13" Name="OpenLoopCurrent Calibration" Value="3200" Unit="mA" />
<FWParameter Index="1" SubIndex="14" Name="CalibrationTime" Value="50" Unit="ms" />
<FWParameter Index="1" SubIndex="15" Name="RotorCalibrated" Value="0" Unit="bool" />
<FWParameter Index="1" SubIndex="16" Name="ThirdHarmonicActive" Value="1" Unit="bool" />
<FWParameter Index="2" SubIndex="0" Name="Controltype" Value="1" Unit="" />
<FWParameter Index="2" SubIndex="1" Name="Referencing type" Value="0" Unit="" />
<FWParameter Index="2" SubIndex="2" Name="Referencing Offset" Value="0" Unit="Tics" />
<FWParameter Index="2" SubIndex="3" Name="Referencing speed" Value="30" Unit="RPM" />
<FWParameter Index="2" SubIndex="4" Name="Referencing speed slow" Value="10" Unit="RPM" />
<FWParameter Index="2" SubIndex="5" Name="Referencing switch type" Value="1" Unit="" />
<FWParameter Index="2" SubIndex="6" Name="max. positionlag" Value="0" Unit="Tics" />
<FWParameter Index="2" SubIndex="7" Name="Enable Break" Value="0" Unit="bool" />
<FWParameter Index="2" SubIndex="8" Name="Break PWM high" Value="70" Unit="%" />
<FWParameter Index="2" SubIndex="9" Name="Break PWM low" Value="70" Unit="%" />
<FWParameter Index="2" SubIndex="10" Name="IPO Position" Value="200000" Unit="Tics" />
<FWParameter Index="2" SubIndex="11" Name="IPO Velocity" Value="200000" Unit="Tics/10ms" />
<FWParameter Index="2" SubIndex="12" Name="Axis inverted" Value="1" Unit="bool" />
<FWParameter Index="3" SubIndex="0" Name="Position P" Value="20" Unit="" />
<FWParameter Index="3" SubIndex="1" Name="Position I" Value="0" Unit="" />
<FWParameter Index="3" SubIndex="2" Name="Position D" Value="0" Unit="" />
<FWParameter Index="3" SubIndex="3" Name="Position AntiWindUp" Value="0" Unit="" />
<FWParameter Index="3" SubIndex="4" Name="Position min" Value="-2500" Unit="" />
<FWParameter Index="3" SubIndex="5" Name="Position max" Value="2500" Unit="" />
<FWParameter Index="3" SubIndex="6" Name="Position sensor" Value="0" Unit="" />
<FWParameter Index="3" SubIndex="7" Name="Velocity P" Value="100" Unit="" />
<FWParameter Index="3" SubIndex="8" Name="Velocity I" Value="20" Unit="" />
<FWParameter Index="3" SubIndex="9" Name="Velocity D" Value="5" Unit="" />
<FWParameter Index="3" SubIndex="10" Name="Velocity AntiWindUp" Value="409600" Unit="" />
<FWParameter Index="3" SubIndex="11" Name="Velocity min" Value="-2048" Unit="" />
<FWParameter Index="3" SubIndex="12" Name="Velocity max" Value="2048" Unit="" />
<FWParameter Index="3" SubIndex="13" Name="Velocity sensor" Value="0" Unit="" />
<FWParameter Index="3" SubIndex="14" Name="DQ P" Value="20" Unit="" />
<FWParameter Index="3" SubIndex="15" Name="DQ I" Value="2" Unit="" />
<FWParameter Index="3" SubIndex="16" Name="DQ D" Value="2" Unit="" />
<FWParameter Index="3" SubIndex="17" Name="DQ AntiWindUp" Value="409600" Unit="" />
<FWParameter Index="3" SubIndex="18" Name="DQ min" Value="-1024" Unit="" />
<FWParameter Index="3" SubIndex="19" Name="DQ max" Value="1024" Unit="" />
<FWParameter Index="3" SubIndex="20" Name="OpenLoop current P" Value="20" Unit="" />
<FWParameter Index="3" SubIndex="21" Name="OpenLoop current I" Value="2" Unit="" />
<FWParameter Index="3" SubIndex="22" Name="OpenLoop current D" Value="0" Unit="" />
<FWParameter Index="3" SubIndex="23" Name="OpenLoop current AntiWindUp" Value="0" Unit="" />
<FWParameter Index="3" SubIndex="24" Name="OpenLoop current min" Value="0" Unit="" />
<FWParameter Index="3" SubIndex="25" Name="OpenLoop current max" Value="1024" Unit="" />
<FWParameter Index="4" SubIndex="0" Name="CAN max. missed coms" Value="1000" Unit="" />
<FWParameter Index="4" SubIndex="1" Name="CAN ID Source" Value="1" Unit="" />
<FWParameter Index="4" SubIndex="2" Name="CAN ID" Value="32" Unit="" />
<FWParameter Index="4" SubIndex="3" Name="SPI Active" Value="0" Unit="" />
</Joint0>
Board Parameters
| Parameter | Description |
|---|---|
| Serial no. | Serial number of the product. Used to identify the date of manufacture. |
| Firmwareversion | Firmware version number to identify the current software version. |
| Hardwareno. | Hardware version number to identify the hardware configuration used. |
| min. supply Voltage | Minimum permissible supply voltage. The minimum supply voltage should be approx. 2V below the nominal voltage. If the supply voltage falls below this limit, the board issues an error message. |
| max. Boardtemp. | Maximum permissible board temperature |
Motor Parameters
| Parameter | Description |
|---|---|
| Encoder Tics | Number of encoder pulses per revolution according to data sheet. |
| No. of Polepairs | Number of pole pairs in the motor according to the data sheet. |
| max. RPM | Maximum rotational speed of the motor. Setting is made according to the data sheet of the motor or on the basis of subsequent components. The value 0 cancels the limitation. |
| max. Motortemp. | Maximum temperature in the motor. The measurement is performed via an optional sensor. The value 0 deactivates the query. |
| max. Current | Maximum motor current according to data sheet. |
| StartUpMethod | Method used to set up the motor when starting the controller. With the automatic start options, the motor starts IPO afterwards.
|
| EncoderInverted | Setting for the direction of rotation of the encoder. The direction of rotation of the signals at the input of the controller must be clockwise according to DIN EN 60034-8. After a change, the controller must be restarted.
|
| MotorInverted | The direction of rotation of the motor must be clockwise according to DIN EN 60034-8. If the setting is incorrect, the motor does not rotate. Only the motor current increases.
|
| OpenLoopCurrent | Setpoint current for the openloop control of the motor. |
| OpenLoopCurrent Standstill | Setpoint current for the openloop control at standstill. |
| OpenLoopCurrent Calibration | Set current for rotor alignment. |
| Calibration Time | Duration for the alignment of the rotor. |
| Motor Nominal Current | Maximum motor current that must not be exceeded for more then 2 seconds continously. |
Axis Parameters
| Parameter | Description |
|---|---|
| Reserved | Reserved for future use. |
| ReferencingType | Selection for the referencing type.
|
| ReferencingOffset | Offset for the axis position after referencing. |
| ReferencingSpeed | Speed for approaching the sensor.
If the axis is referenced in the wrong direction, this parameter can be set to negative. |
| ReferencingSpeedSlow | Speed for fine positioning of the axis during homing.
If the axis is referenced in the wrong direction, this parameter can be set to negative. |
| ReferencingSwitchType | Type of the reference sensor.
|
| max. Positionlag | Permissible position error of the axis. With fast movements, the axis runs after the position setpoint. If the limit value is exceeded, the axis stops and an error message appears. If the value is set to 0, there is no monitoring. |
| Break Type | Parameter for activating a brake on the robot axis. If the robot has a holding brake, which should be controlled by the motor controller, this value must be set. The brakes are released when the axes are activated.
In blocking brake mode, a free-positioning movement occurs. A blocking brake means a pin or similar, which blocks the rotor. A friction brake describes a disc brake. |
| Break PWM High | If a brake is configured on the axis, this parameter specifies the PWM value for releasing the brake. |
| Break PWM Low | Voltage to hold the brake after releasing the brake; the motor controller lowers the output voltage to the specified value. |
| IPO Position | Positive position value for the IPO. In standalone mode, the IPO moves this value symmetrically around the zero point, from -IPO position to IPO position. |
| IPO Velocity | Speed for IPO mode in standalone operation. |
| Axis inverted | Changes the direction of the axis. |
| Gear ratio | Gear ratio of the gear unit. For i=1:50 correspondingly 50. Only integer values are possible. |
| Axis Enc Type | Encoder type.
|
Control Parameters
| Parameter | Description |
|---|---|
| Position P | P component for position control. |
| Position I | I component for position control. |
| Position P scale | Scaling of the P component by 2x. |
| Position min. | Minimum limitation for the output of the position control. |
| Position max. | Maximum limitation for the output of the position control. |
| Velocity P | P component for speed control. |
| Velocity I | I portion for speed control. |
| Velocity P scale | Scaling of the P component in 2x. |
| Velocity min. | Minimum limitation for the output of the speed control. |
| Velocity max. | Maximum limitation for the output of the speed control. |
| DQ-P | P component for DQ control. |
| DQ-I | I component for DQ control. |
| DQ back calc | Backcalculation factor for DQ controller. |
| DQ-min. | Minimum limitation for the output of the DQ control. |
| DQ-max. | Maximum limitation for the output of the DQ control. |
| Openloop P | P component for Openloop current control. |
| Openloop I | I component for Openloop current control. |
| Openloop D | D component for Openloop current control. |
| Openloop AntiWindUp | AntiWindUp for Openloop current control. |
| Openloop min. | Minimum limitation for the output of the Openloop current control. |
| Openloop max. | Maximum limitation for the output of the Openloop current control. |
Communication Parameters
| Parameter | Description |
|---|---|
| CAN max. missed Coms | Maximum number of failed communication attempts on the CAN bus. Exceeding the value leads to the motor controller being switched off. |
| CAN ID Source | Source for the CAN ID.
|
| CAN ID | CAN ID for the controller. |
| SPI Active | Enable SPI communication. |