USB-CAN connection to Robolink DCi
This guide applies to DCi Robots shipped from 2019.
In rare cases it may be necessary to connect a Windows PC directly to the DCI electronics by-opassing the embedded Linux computer inside the DCi Robot.
To do that, this USB-CAN adapter is required: https://www.peak-system.com/PCAN-USB.199.0.html.
- Install the PCAN driver available in the link above.
- Connect the USB to CAN adapter to the PC and the D-Sub port of the DCi Robot.
- Once an electrical connection has been made between the DCi robot, switch i9t on and wait until the green LEDs at the back of the robot start blinking.
- Download ModuleCtrl and start the executable.
- Select Protocol "CPRCANV2", CAN ID "0x10" and click "Connect".
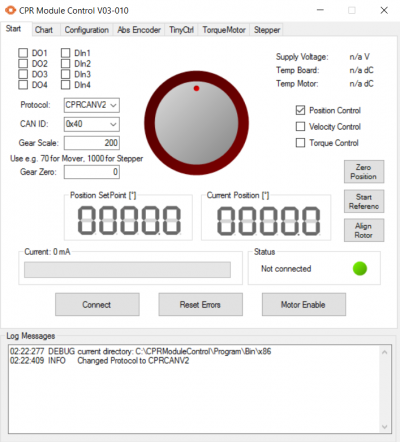
Start tab in ModuleCtrl - Switch to the "TinyCtrl" tab and click on the "Shut down" button. This kills the TinyCtrl Process running on the embedded Linux computer, so external that CAN communication is possible. The green LEDs at the back of the robot will stop blinking.
- Now the Robot con be controlled via CPRog in trhe usual way with the ethernet cable disconnected. To exit this mode of operation it is easiest, to power-cycle the robot, disconnect the CAN cable and connect the ethernet cable.

Please note that, if the USB-CAN adapter is connected to the Windows PC, CPRog will always try connect via CAN first! So when communication via ethernet, the USB-CAN adapter needs to be disconnected from the PC.