Arrange Application: Difference between revisions
mNo edit summary |
mNo edit summary |
||
| (2 intermediate revisions by the same user not shown) | |||
| Line 1: | Line 1: | ||
This applications aims at arranging a flower-like bouquet out of wine gum. | This applications aims at arranging a flower-like bouquet out of wine gum. | ||
'''Developer''': [https://rbtx.com | '''Developer''': [https://rbtx.com RBTX] | ||
You can find a video of the result [https://downloads.cpr-robots.com/Wiki-Files/Examples/Arrange/Arrange_Video.mp4 here]! | You can find a video of the result [https://downloads.cpr-robots.com/Wiki-Files/Examples/Arrange/Arrange_Video.mp4 here]! | ||
| Line 10: | Line 10: | ||
'''Robot Type''': igus Delta DLE-DR-0050 | '''Robot Type''': igus Delta DLE-DR-0050 | ||
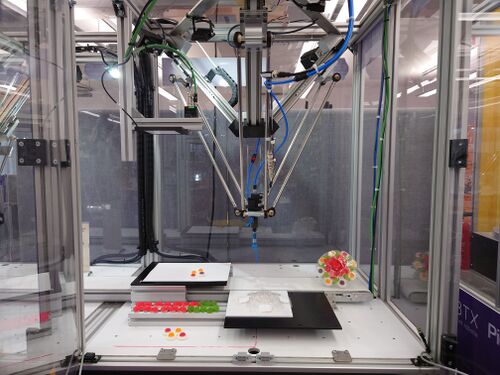
[[File:Arrange_Setup.JPG|thumb|500px]] | [[File:Arrange_Setup.JPG|thumb|500px|link=]] | ||
The delta robot is equipped | The delta robot is equipped with a vacuum pump and an [[2D Camera Integration | ifm-camera]]. | ||
The vacuum pump is mounted on a external rotary axis, for correct alignment. | The vacuum pump is mounted on a external rotary axis, for correct alignment. | ||
The camera detects the different gummy types and picks the correct one for the current arrange step. The gummy is then placed on the correct position of target-tray in a pre-defined order. | The camera detects the different gummy types and picks the correct one for the current arrange step. The gummy is then placed on the correct position of target-tray in a pre-defined order. | ||
[[Category:Delta]] | |||
Latest revision as of 13:59, 18 May 2026
This applications aims at arranging a flower-like bouquet out of wine gum.
Developer: RBTX
You can find a video of the result here!
Program files: Arrange_Programs.zip
Setup
Robot Type: igus Delta DLE-DR-0050
The delta robot is equipped with a vacuum pump and an ifm-camera.
The vacuum pump is mounted on a external rotary axis, for correct alignment.
The camera detects the different gummy types and picks the correct one for the current arrange step. The gummy is then placed on the correct position of target-tray in a pre-defined order.