Example Library: Difference between revisions
mNo edit summary |
mNo edit summary |
||
| (5 intermediate revisions by the same user not shown) | |||
| Line 6: | Line 6: | ||
If you want to contribute to this page, please contact us! | If you want to contribute to this page, please contact us! | ||
<div style="clear: | <div style="clear:both;" /div> | ||
= General = | |||
[[File:IRC_V15.png|thumb|300px|link=General Examples]] | |||
Non-robot related tools, like controller integration, control interfaces and plugins. | |||
:[[General Examples]] | |||
<div style="clear:both;" /div> | |||
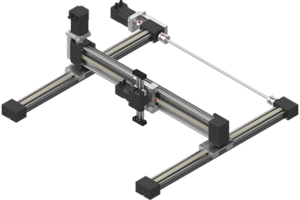
= Gantry = | = Gantry = | ||
[[File:GANTRY.png|thumb|300px]] | [[File:GANTRY.png|thumb|300px|link=Gantry Examples]] | ||
Basic allrounder robots, suitable for most industrial applications. Highly adjustable for many use cases. | |||
:[[Gantry Examples]] | :[[Gantry Examples]] | ||
<div style="clear: | <div style="clear:both;" /div> | ||
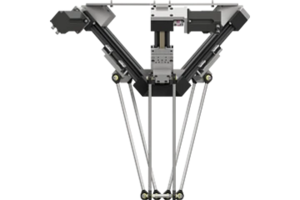
= Delta = | = Delta = | ||
[[File:DELTA.png|thumb|300px]] | [[File:DELTA.png|thumb|300px|link=Delta Examples]] | ||
Delta robots for high speed pick & place tasks. | Delta robots for high speed pick & place tasks. | ||
:[[Delta Examples]] | :[[Delta Examples]] | ||
<div style="clear: | <div style="clear:both;" /div> | ||
= Rebel & Robolink = | = Rebel & Robolink = | ||
[[File:ReBeL.png|thumb|300px]] | [[File:ReBeL.png|thumb|300px|link=ReBeL Examples]] | ||
Articulated | Articulated robots for complex movements. | ||
:[[ReBeL Examples]] | :[[ReBeL Examples]] | ||
<div style="clear: | <div style="clear:both;" /div> | ||
= Scara = | = Scara = | ||
[[File:SCARA.png|thumb|300px]] | [[File:SCARA.png|thumb|300px|link=Scara Examples]] | ||
Fast, precise & flexible robots for pick & place applications. | Fast, precise & flexible robots for pick & place applications. | ||
:[[Scara Examples]] | :[[Scara Examples]] | ||
<div style="clear: | <!-- <div style="clear:both;" /div> | ||
= Mobile Platform = | -- = Mobile Platform = | ||
[[File:EDUMOVE.png|thumb|300px]] | -- [[File:EDUMOVE.png|thumb|300px|link=Mobile Platform Examples]] | ||
Mobile robot that can move around freely. | -- Mobile robot that can move around freely. | ||
-- | |||
:[[Mobile Platform Examples]] | -- :[[Mobile Platform Examples]] | ||
--> | |||
Latest revision as of 12:47, 24 June 2026
Here you can find sample applications that have been developed in- and outside of igus.
Feel free to use them as a starting point for your project! Also have a look at other robot types. Often Programs can be easily translated between robots!
If you want to contribute to this page, please contact us!
General

Non-robot related tools, like controller integration, control interfaces and plugins.
Gantry
Basic allrounder robots, suitable for most industrial applications. Highly adjustable for many use cases.
Delta
Delta robots for high speed pick & place tasks.
Rebel & Robolink

Articulated robots for complex movements.
