Example Library: Difference between revisions
mNo edit summary |
mNo edit summary |
||
| Line 8: | Line 8: | ||
<div style="clear:right;" /div> | <div style="clear:right;" /div> | ||
= Gantry = | = Gantry = | ||
[[File:GANTRY.png|thumb|300px]] | [[File:GANTRY.png|thumb|300px|link=Gantry Examples]] | ||
Most basic robots with 2 or more linear axes. | Most basic robots with 2 or more linear axes. | ||
| Line 15: | Line 15: | ||
<div style="clear:right;" /div> | <div style="clear:right;" /div> | ||
= Delta = | = Delta = | ||
[[File:DELTA.png|thumb|300px]] | [[File:DELTA.png|thumb|300px|link=Delta Examples]] | ||
Delta robots for high speed pick & place tasks. | Delta robots for high speed pick & place tasks. | ||
| Line 22: | Line 22: | ||
<div style="clear:right;" /div> | <div style="clear:right;" /div> | ||
= Rebel & Robolink = | = Rebel & Robolink = | ||
[[File:ReBeL.png|thumb|300px]] | [[File:ReBeL.png|thumb|300px|link=ReBeL Examples]] | ||
Articulated arm robots for complex movements. | Articulated arm robots for complex movements. | ||
| Line 29: | Line 29: | ||
<div style="clear:right;" /div> | <div style="clear:right;" /div> | ||
= Scara = | = Scara = | ||
[[File:SCARA.png|thumb|300px]] | [[File:SCARA.png|thumb|300px|link=Scara Examples]] | ||
Fast, precise & flexible robots for pick & place applications. | Fast, precise & flexible robots for pick & place applications. | ||
| Line 36: | Line 36: | ||
<div style="clear:right;" /div> | <div style="clear:right;" /div> | ||
= Mobile Platform = | = Mobile Platform = | ||
[[File:EDUMOVE.png|thumb|300px]] | [[File:EDUMOVE.png|thumb|300px|link=Mobile Platform Examples]] | ||
Mobile robot that can move around freely. | Mobile robot that can move around freely. | ||
| Line 43: | Line 43: | ||
<div style="clear:right;" /div> | <div style="clear:right;" /div> | ||
= General = | = General = | ||
[[File:Tablet.png|thumb|300px]] | [[File:Tablet.png|thumb|300px|link=General Examples]] | ||
Non-robot related tools, like controller integration, control interfaces and plugins. | Non-robot related tools, like controller integration, control interfaces and plugins. | ||
:[[General Examples]] | :[[General Examples]] | ||
Revision as of 15:35, 28 August 2025
Here you can find sample applications that have been developed in- and outside of igus.
Feel free to use them as a starting point for your project! Also have a look at other robot types. Often Programs can be easily translated between robots!
If you want to contribute to this page, please contact us!
Gantry
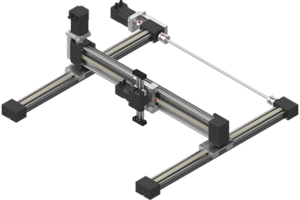
Most basic robots with 2 or more linear axes.
Delta
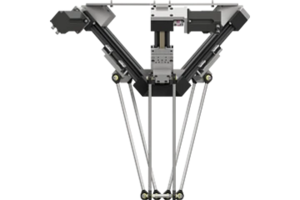
Delta robots for high speed pick & place tasks.
Rebel & Robolink

Articulated arm robots for complex movements.
Scara

Fast, precise & flexible robots for pick & place applications.
Mobile Platform

Mobile robot that can move around freely.
General

Non-robot related tools, like controller integration, control interfaces and plugins.