General Examples: Difference between revisions
mNo edit summary |
mNo edit summary |
||
| Line 21: | Line 21: | ||
<div style="clear:both;" /div> | <div style="clear:both;" /div> | ||
= Defining paths via CAD = | = Defining paths via CAD = | ||
[[File:Screen01_Workpiece.png|thumb|300px|link=Definition_of_a_DXF_file_in_SolidWorks|[[Definition_of_a_DXF_file_in_SolidWorks | Definition of a DXF file in SolidWorks]]]] | |||
The path and point sequence commands move the robot along a path defined by a DXF or CSV file. At each start and end of a path segment or point the tool can be lowered and lifted or enabled by a digital output. [[Definition of a DXF file in SolidWorks]] explains how to create a path and load it into iRC. | The path and point sequence commands move the robot along a path defined by a DXF or CSV file. At each start and end of a path segment or point the tool can be lowered and lifted or enabled by a digital output. [[Definition of a DXF file in SolidWorks]] explains how to create a path and load it into iRC. | ||
Revision as of 06:42, 16 October 2025
Here you can find some example applications for everything that is not directly associated to a robot.
Feel free to use them for your own program!
Dispensing Application
General example for dispensing applications.
Moving via Modbus
How to move your robot via Modbus.
Defining paths via CAD
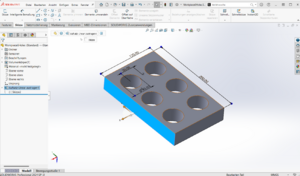
The path and point sequence commands move the robot along a path defined by a DXF or CSV file. At each start and end of a path segment or point the tool can be lowered and lifted or enabled by a digital output. Definition of a DXF file in SolidWorks explains how to create a path and load it into iRC.
Glueing and Dispensing
Glueing and dispensing requires different optimizations than pick and place applications. The article Dispensing Applications shows two approaches using the path command and basic motion commands to follow a path and enable a digital output for the dispenser.
Palletizing and Error Recovery
The article Matrix Palletizing and Error Recovery explains how palletizing applications can be programmed using matrix commands. The example handles restarting the position on the pallet on error and starting the pallet at any index.
Circular Curves
Circular Motion explains how to move along circular curves complete circles.
Program Structure
The article Structured Programming explains how to use sub programs and matrices to create a clean program structure.
Legacy Examples
In CPRog Examples you can find further examples that were created with earlier versions of the software but they still work in the current version. These examples will be updated in future.